Задание 4: Творческое иллюстрирование. Нарисуйте эскиз роботизированной руки (манипулятора) с тремя сервомоторами: один для плеча, один для локтя, один для кисти. Используйте цветные карандаши. Подпишите, как каждый сервомотор управляет движением (например, «поворот на 90° для захвата»). Добавьте стрелки, показывающие принцип обратной связи.
Ответ:
Описание выполнения задания:
Для выполнения этого задания необходимо нарисовать схематичное изображение роботизированной руки. Рука должна состоять из трех сегментов: плечо, предплечье и кисть. На месте каждого сустава (плечевой, локтевой, запястный) нужно изобразить сервомотор. К каждому сервомотору следует добавить подпись, описывающую его функцию. Например:
- Сервомотор плеча: «Подъем и опускание руки»
- Сервомотор локтя: «Сгибание и разгибание предплечья»
- Сервомотор кисти: «Поворот кисти для захвата»
Также необходимо нарисовать стрелки, иллюстрирующие направление движения каждого сервомотора. Принцип обратной связи обычно подразумевает, что датчик положения (например, потенциометр или энкодер), связанный с валом сервомотора, отправляет информацию о текущем положении обратно в управляющее устройство, чтобы оно могло корректировать движение. Можно изобразить эти стрелки, идущие от сервомотора к гипотетическому «контроллеру».
Похожие
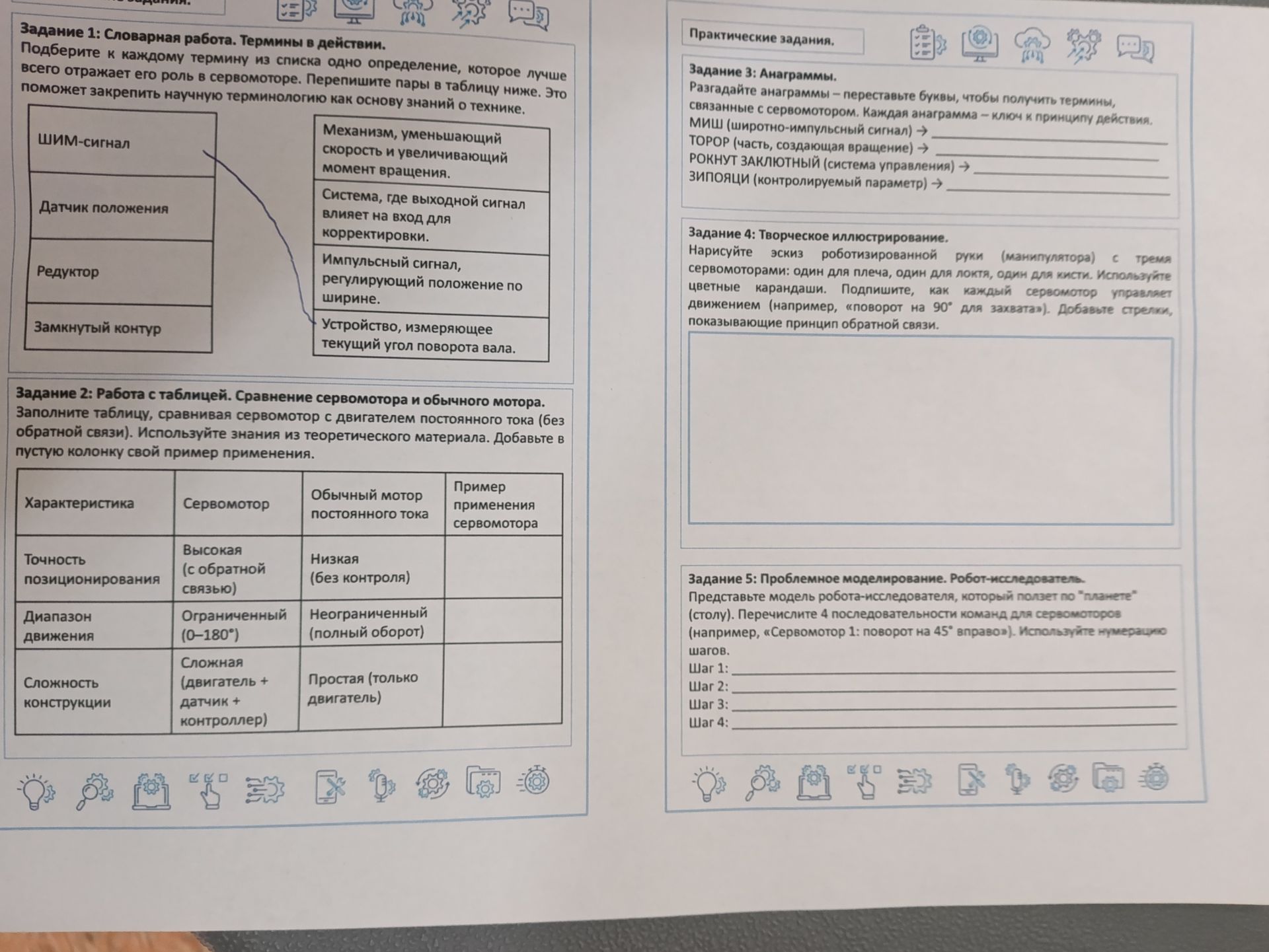
- Задание 1: Словарная работа. Термины в действии. Подберите к каждому термину из списка одно определение, которое лучше всего отражает его роль в сервомоторе. Перепишите пары в таблицу ниже. Это поможет закрепить научную терминологию как основу знаний о технике.
- Задание 2: Работа с таблицей. Сравнение сервомотора и обычного мотора. Заполните таблицу, сравнивая сервомотор с двигателем постоянного тока (без обратной связи). Используйте знания из теоретического материала. Добавьте в пустую колонку свой пример применения.
- Задание 3: Анаграммы. Разгадайте анаграммы — переставьте буквы, чтобы получить термины, связанные с сервомотором. Каждая анаграмма — ключ к принципу действия.
- Задание 5: Проблемное моделирование. Робот-исследователь. Представьте модель робота-исследователя, который ползет по "планете" (столу). Перечислите 4 последовательности команд для сервомоторов (например, «Сервомотор 1: поворот на 45° вправо»). Используйте нумерацию шагов.
